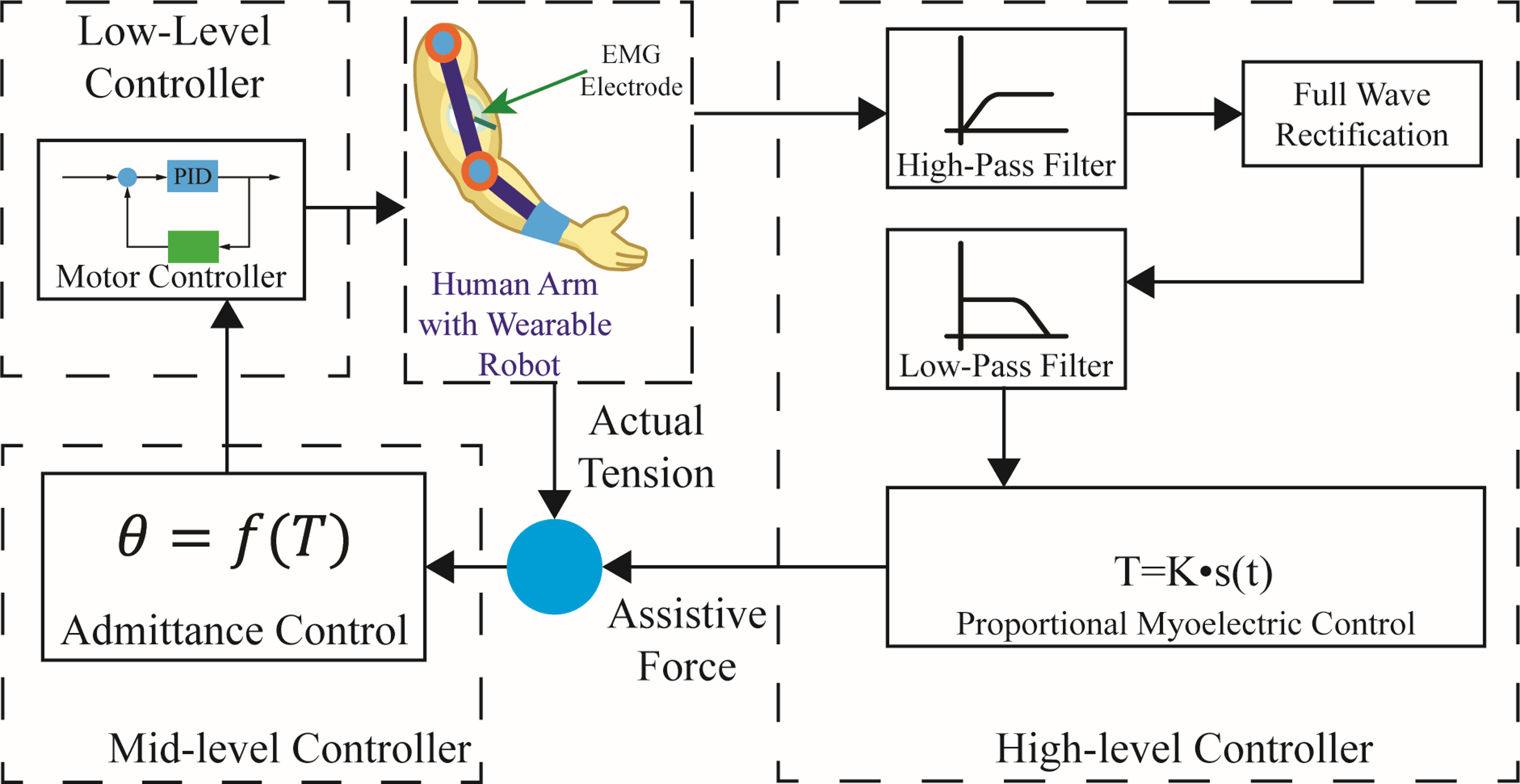
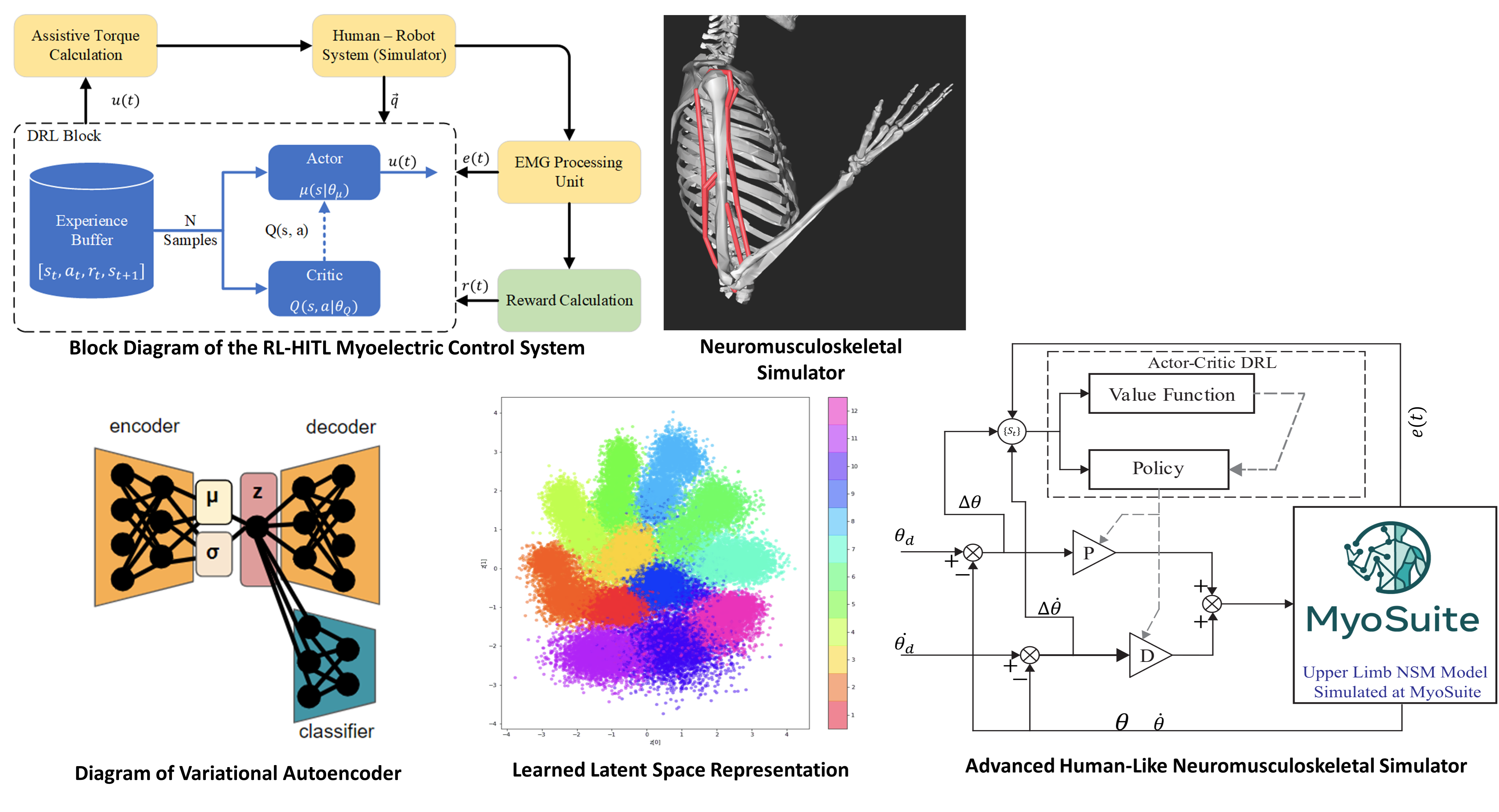
Cable-driven Upper Body Exosuit (CUBE)
- Bilateral six degrees of freedom arm exosuit, myoelectric controlled, reinforcement learning implemented.
- Provide shoulder flexion/extension, abb-/ adduction, and elbow flexion/extension assistance
- Human-in-the-loop control with integrated EMG (10-channel), IMU (5-channel), and tension (6-channel) sensors.
- Rehabilitation, Assistance (pick and place or overhead work), and augmentation/stabilization

- J. Fu, S. M. Hosseini, R. Simpson, A. Brooks, R. Huff and J. -H. Park, “A Bilateral Six Degree of Freedom Cable-driven Upper Body Exosuit,” 2022 IEEE International Conference on Mechatronics and Automation (ICMA), Guilin, Guangxi, China, 2022, pp. 617-623, doi: 10.1109/ICMA54519.2022.9856241. – “Best Student Paper Award”
- J. Fu, Z. Al-Mashhadani, K. Currier, A. Al-Ani and J. Park, “Challenges and Trends of Machine Learning in the Myoelectric Control System for Upper Limb Exoskeletons and Exosuits” in Multi-Robot Systems, K. Dr. Serdar Ed. Rijeka: IntechOpen, p. Ch. 16. 2023 (ISBN 978-1-83768-289-8, DOI: http://dx.doi.org/10.5772/intechopen.111901)
- Fu, J., Choudhury, R., M. Hosseini, S., Simpson, R., Choudhury, R., Park, J., “Myoelectric Control Systems for Upper Limb Wearable Robots-A systematic review”, Sensors (Basel). 2022 Oct 24;22(21):8134. DOI: 10.3390/s22218134
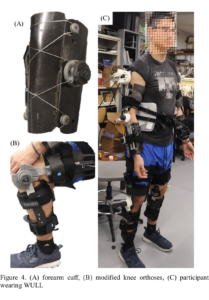
Worksharing of Upper and Lower Limbs (WULL)
- Creating a mechanical pathway to capture and transfer upper limb motion/force to lower limbs
- Assisting mobility, rehabilitation, or augmentation
- IRB-approved human subject experiment in progress
- G. R. Carbonell, R. Choudhury, E. Frankle, I. F. Kadhim, D. Fukuda and J. -H. Park, “Work-sharing of Upper and Lower Limbs (WULL) to Assist Ambulatory Movements,” 2022 9th IEEE RAS/EMBS International Conference for Biomedical Robotics and Biomechatronics (BioRob), Seoul, Korea, Republic of, 2022, pp. 1-6, doi: 10.1109/BioRob52689.2022.9925403.
- J-H. Park, G. Carbonell, E. Frankle, “Appendage Work Sharing Apparatus”, US Patent 63/345,295, May 27, 2022
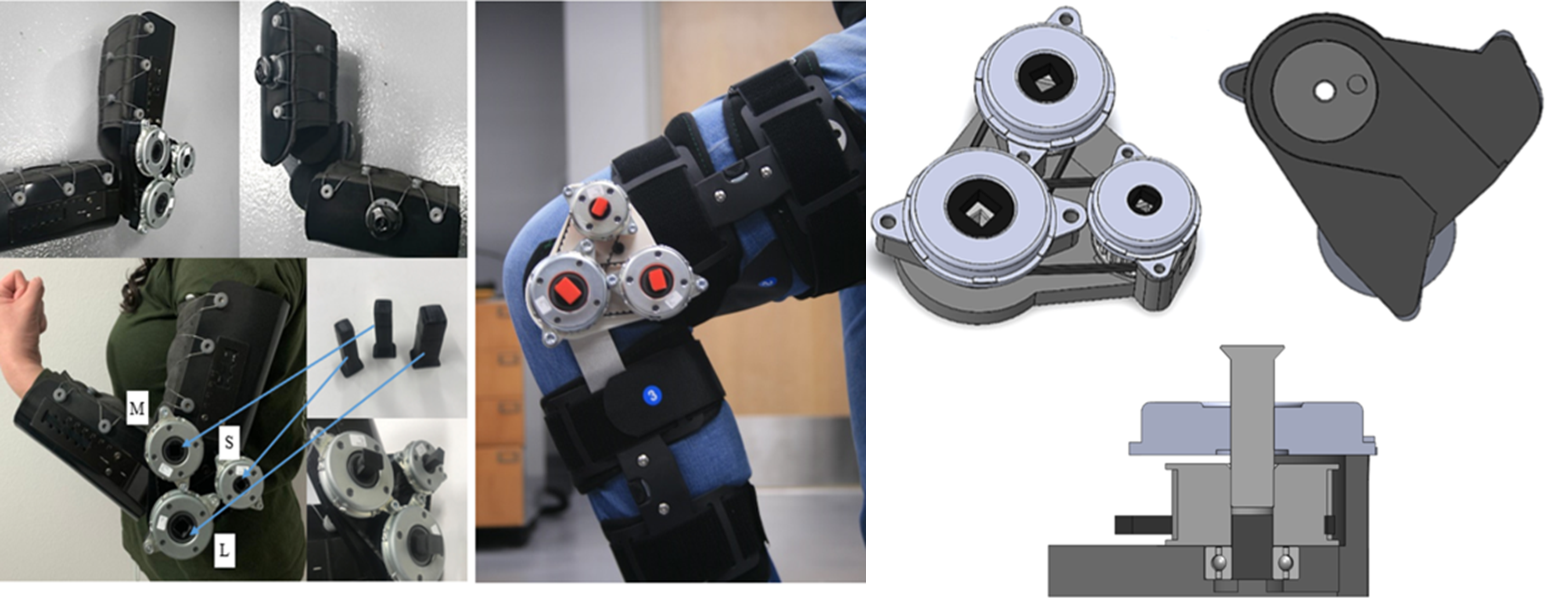
VAriable Resistance Suit (VARS)
- Wearable device designed to provide adjustable, bi-directional, speed-dependent resistance at a targeted joint
- Enhance resistance training outcomes
- IRB-approved human subject experiment results supported the efficacy and effectiveness of VARS in inducing muscle hypertrophy
- Kadhim, IF, Aracena Alvial, AA, Frankle, E, Rios Carbonell, G, Hosseini, SM, Fukuda, D, Stout, J, & Park, J. “Variable Resistance Suit (VARS) for Enhancing Resistance Training.” Proceedings of the ASME 2022 International Design Engineering Technical Conferences and Computers and Information in Engineering Conference. Volume 7: 46th Mechanisms and Robotics Conference (MR). St. Louis, Missouri, USA. August 14–17, 2022. V007T07A055. ASME. https://doi.org/10.1115/DETC2022-91042
- J-H. Park, I. Kadhim, A. Alvial, G. Carbonell, S. Mohammadhosseini, “VARIABLE RESISTANCE EXERCISE APPAREL”, US Patent 63/343,302, May 19, 2022
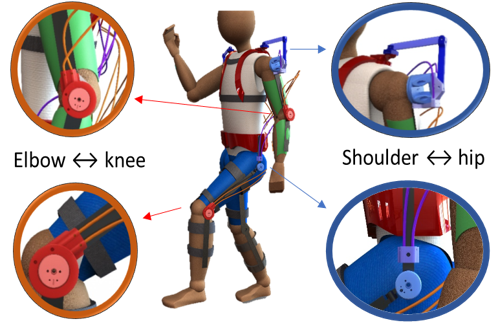
Wearable Feedback for Environmental Interpretation (WeFEI)
- Wearable device to provide auditory and vibrotactile cues to assist navigation and reaching/grasping tasks
- RGBD camera and Computer vision running on a Single board computer (Nvidia Jetson Xavier) with low level micro controllers to control vibrotactile feedback
- Vision transformer architecture and custom built collision prediction using bounding box trajectories of surrounding objects
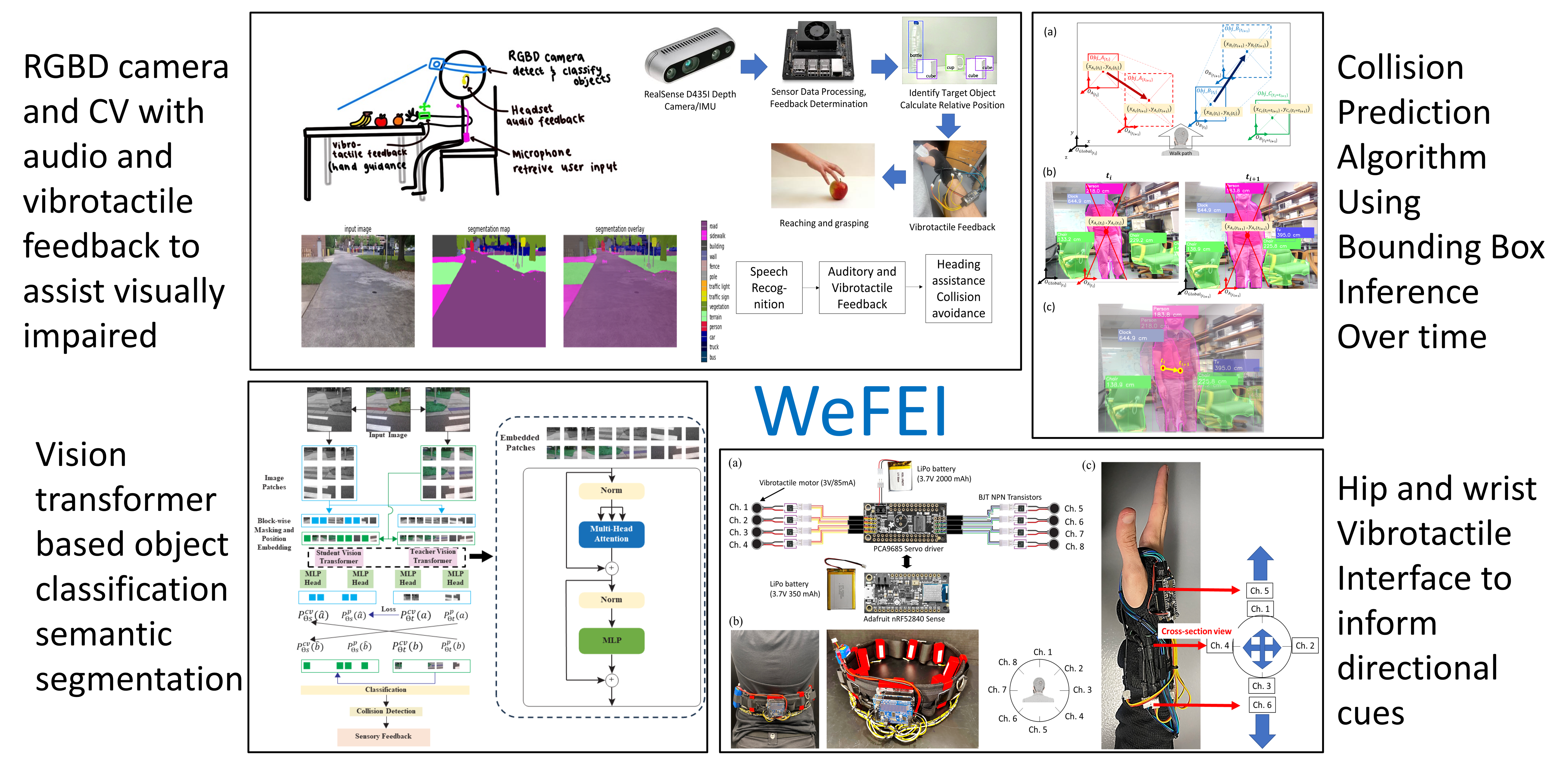
Bayat N, Kim J-H, Choudhury R, Kadhim IF, Al-Mashhadani Z, Aldritz Dela Virgen M, Latorre R, De La Paz R, Park J-H. Vision Transformer Customized for Environment Detection and Collision Prediction to Assist the Visually Impaired. Journal of Imaging. 2023; 9(8):161. https://doi.org/10.3390/jimaging9080161
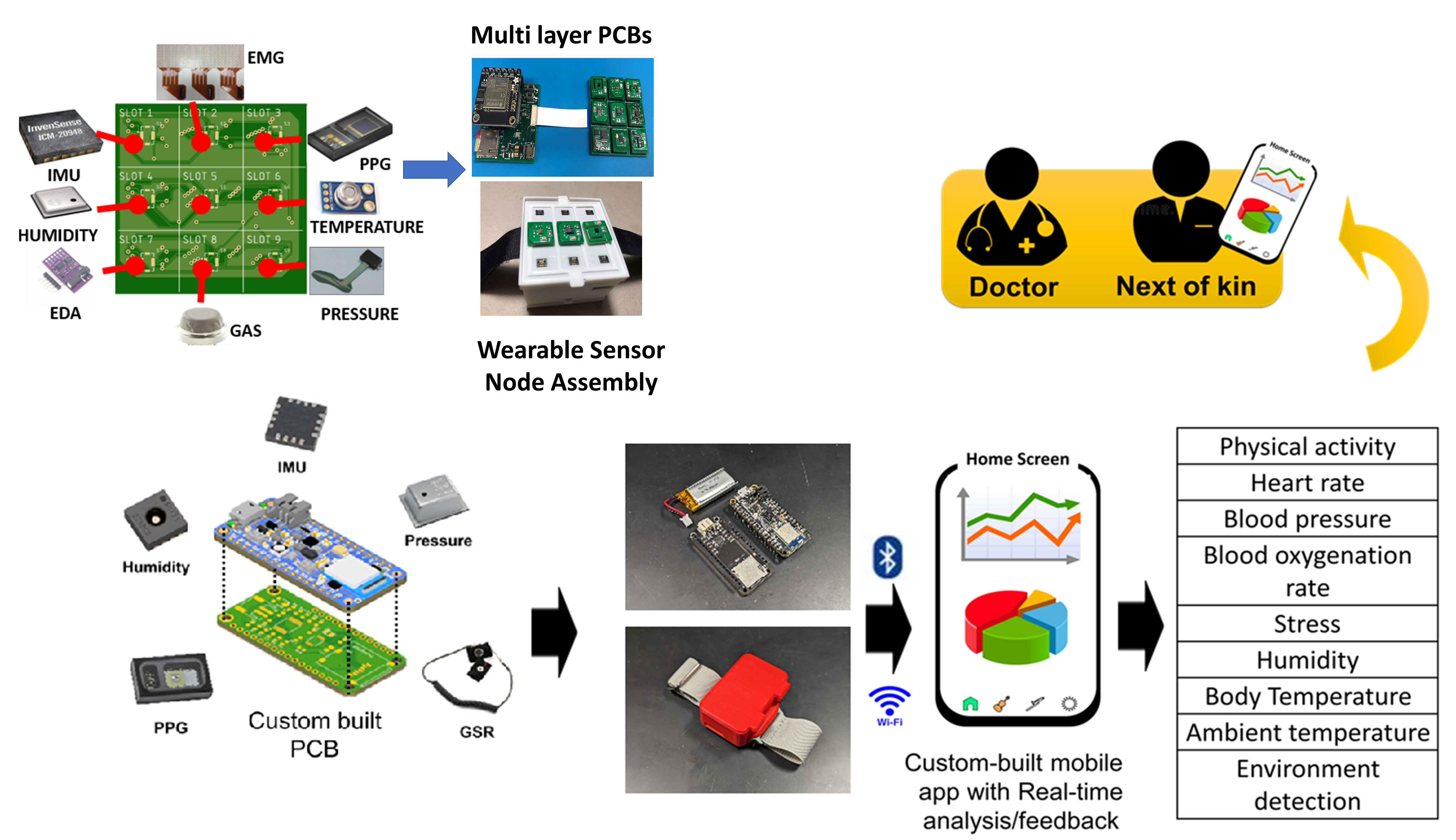
Multimodal Human and Ambience Sensing System (MuHASS)
- Custom built multimodal sensor system capable of measuring key physiological and environmental parameters
- Mobile app incorporating real-time feedback and data analysis capabilities to inform state detection and intervention purposes
- Clinically relevant and research grade hardware and software, tested for its usability and practicality in free living environments by older adults
- Devasundaram, S., Raymond, A., Virgen, M., Shapiro, D. and Park, J-H. Design of a Reconfigurable Multimodal Wearable Sensor Network (RMWSN) for Human Health and Ambience Monitoring. In Proceedings of the 11th International Conference on Sensor Networks, ISBN 978-989-758-551-7, ISSN 2184-4380, pages 26-33. 2022 DOI: 10.5220/0010838100003118
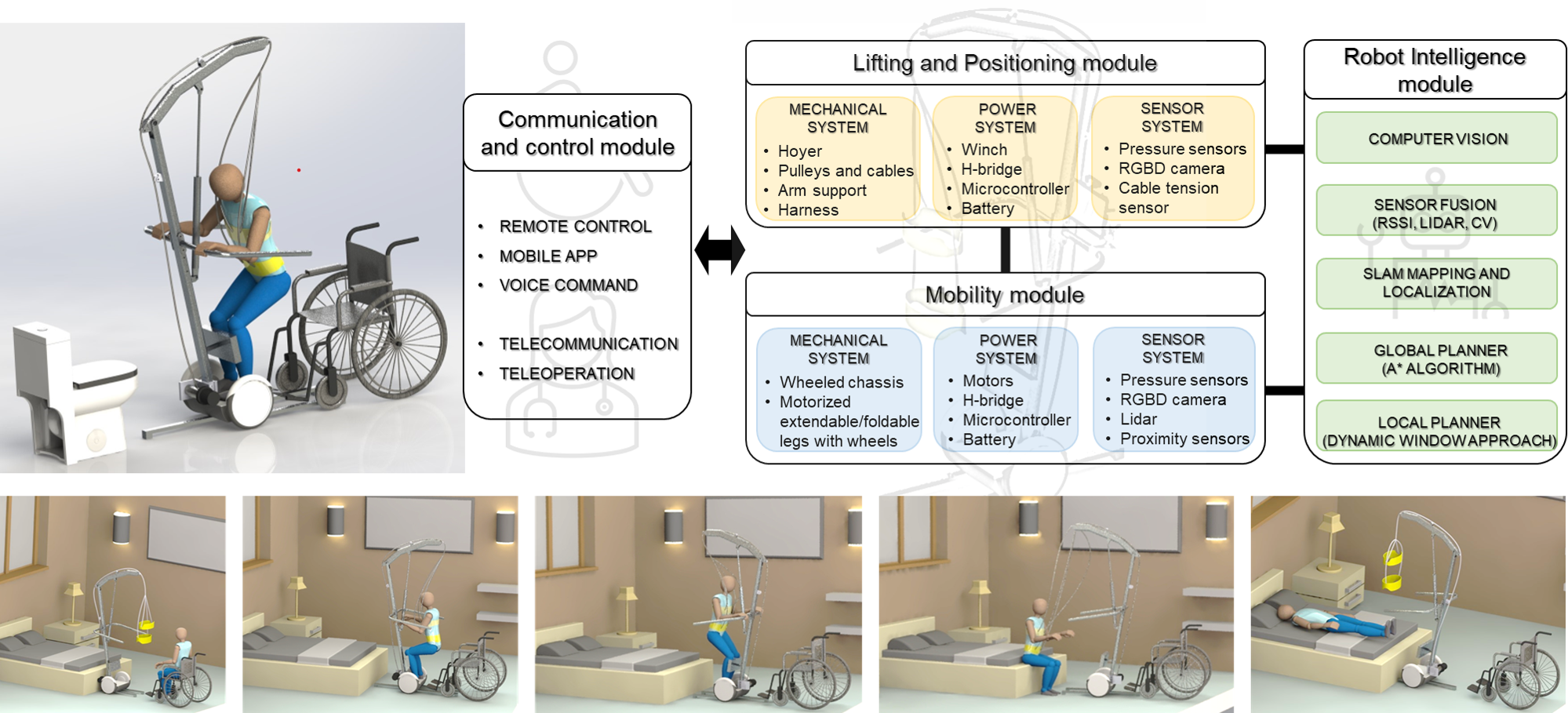
Patient Transfer Robot (PATRO)
- Understand gaps and limitations of current patient transfer devices
- Address implementation barriers of robotic assistive devices for patient transfer
- Integration of AI, robotics and advanced user-robot communication and interactions to promote safety, independence and usability of patient transfer robot
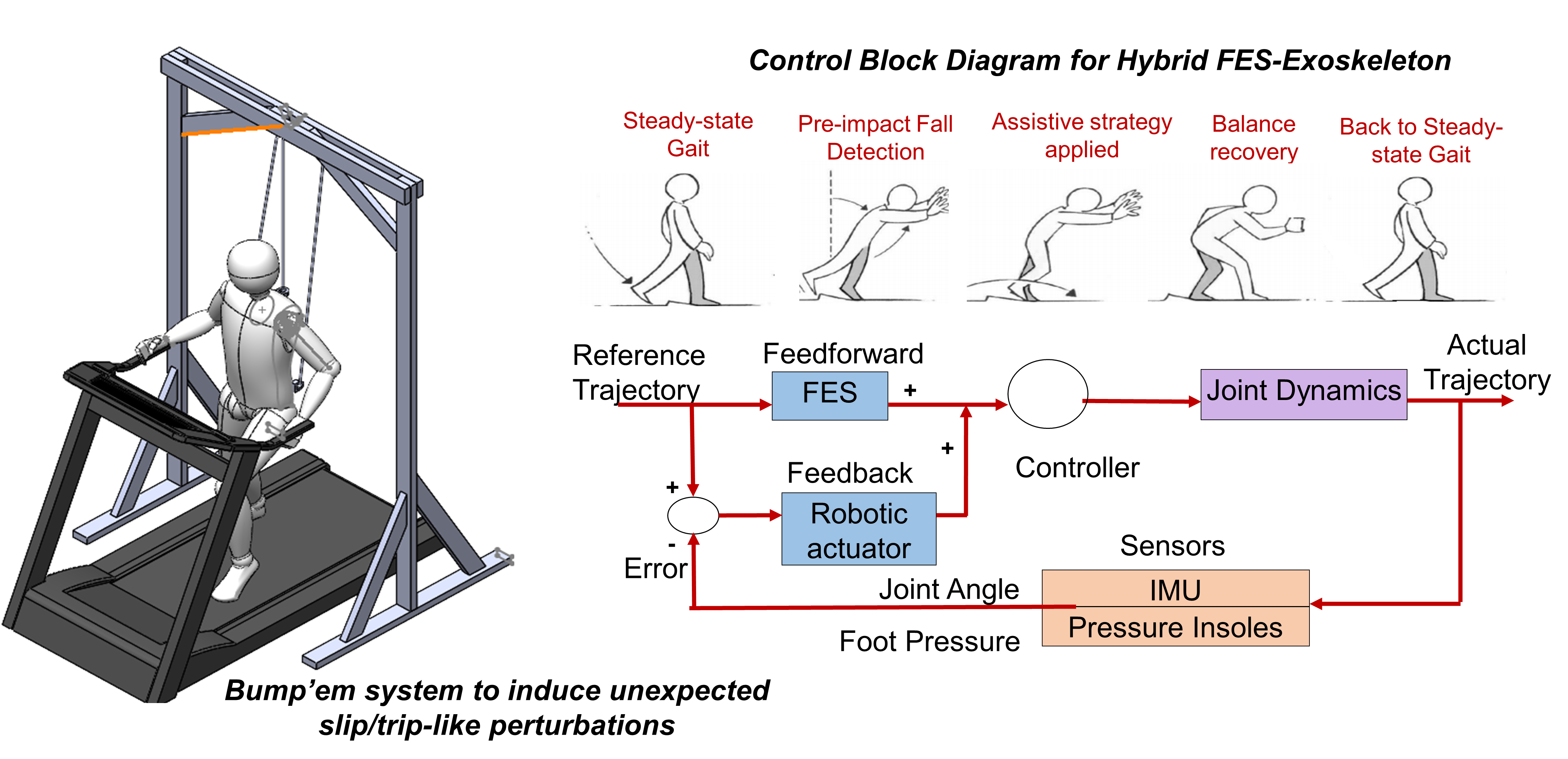
A Cable-driven Ankle Perturbation System to Study Fall Mechanics from Slips and Trips
- Develop a force-controlled gait perturbation system to emulate unexpected slip- and trip-like responses during gait.
- Characterize the biomechanical and neural control responses of healthy young adults across different perturbation modalities
- Develop pre-impact fall detection algorithms to detect loss of balance after unexpected slip-/trip-like perturbations
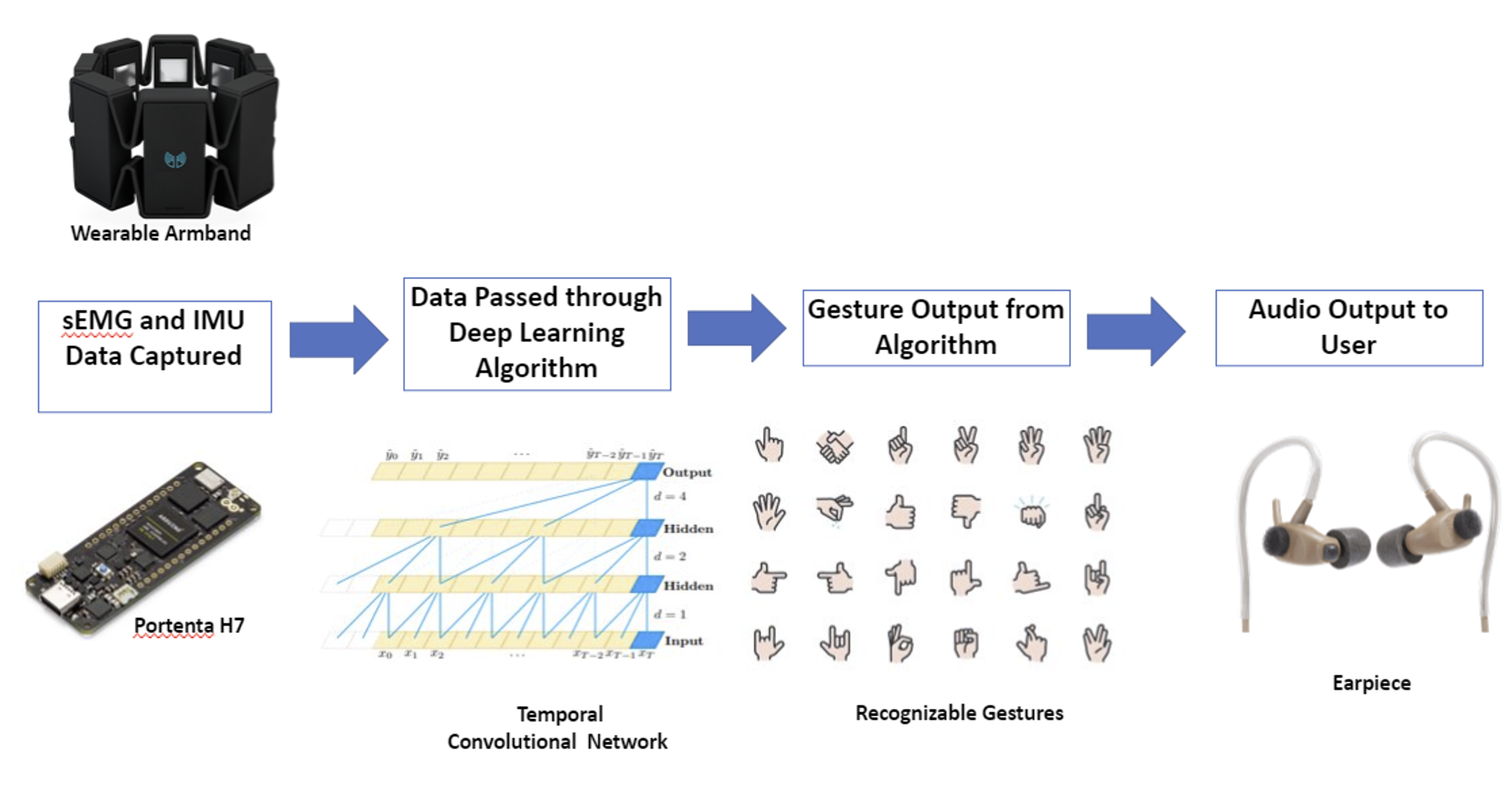
Motion2Sound (M2S)
- Vocalizing Gesture using Wearables and Machine Learning
- 8 channel EMG armband integrated with a microcontroller (Portenta)
- Developed gesture recognition model using Temporal Convolutional Network and LSTM
- Targeting people with communication disorders or speech impairment to assist conversion of arm/hand gestures to audio, customizable to individual’s motion capability
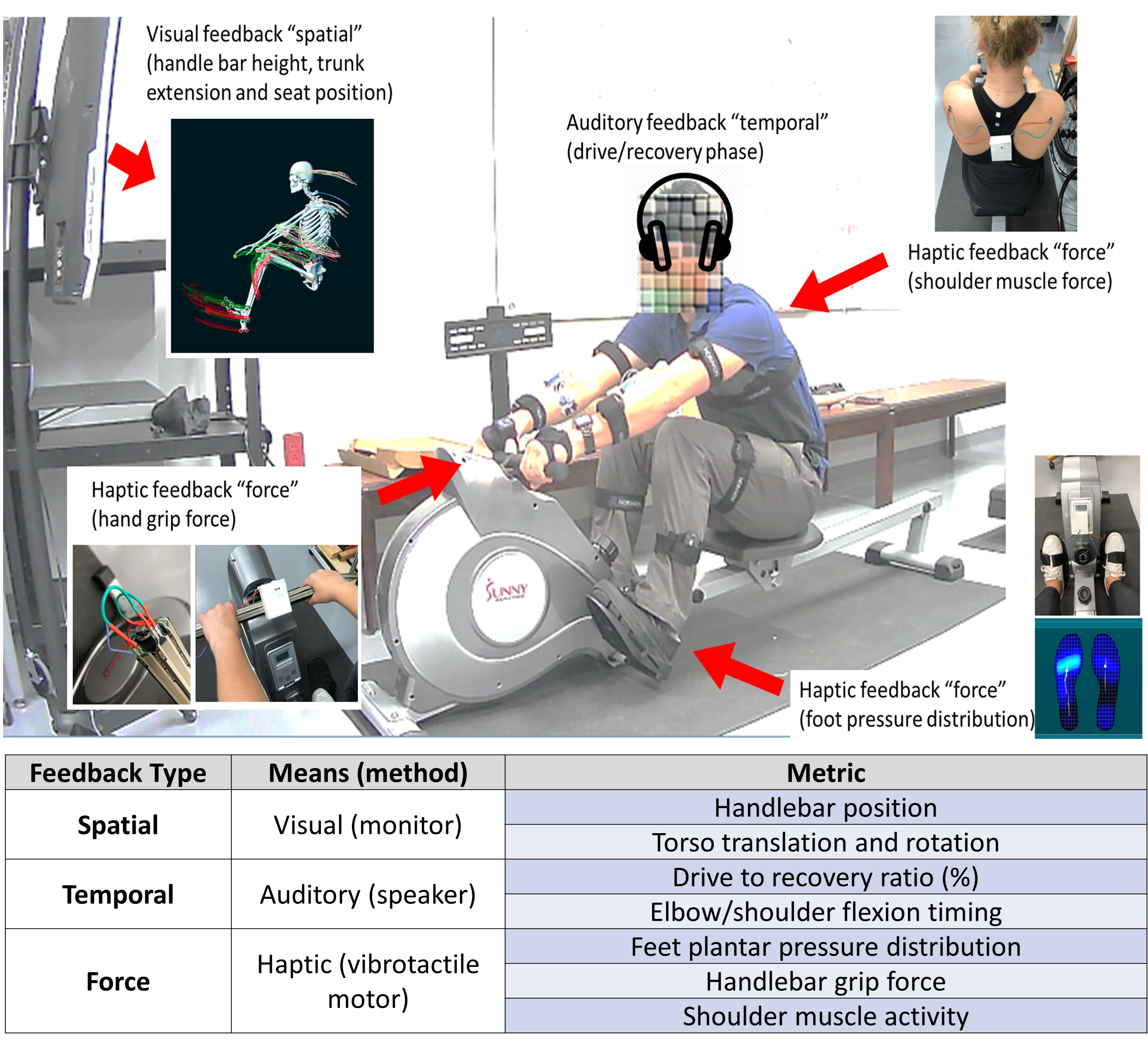
Multimodal Sensory Feedback (MSF) for enhanced Motor Learning
- Understanding how different sensory feedback help learning spatial, temporal and force modulation of full body motor skills
- Identify optimal multimodal sensory feedback via visual, auditory and haptic feedback for motor learning
- IRB-approved human subject study in progress
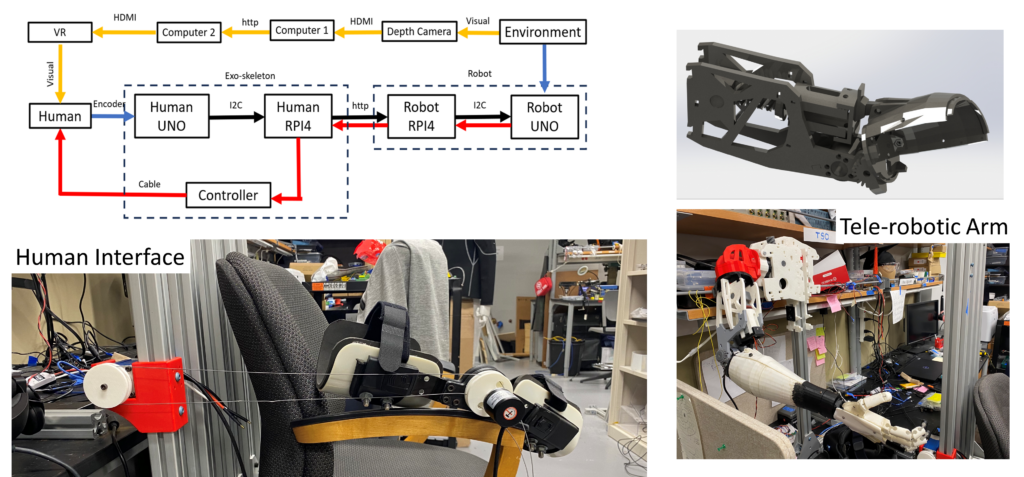
Telerobotic Space Operator (TSO)
- Develop a tele robotic system integrating actuating mechanisms, sensors, and wireless communication protocol to provide a tele presence with haptic feedback.
- The robot can act as a long-term personnel that stations outer space to perform routine maintenance tasks which eliminates the need for recurring expeditions.
- Conduct experimental evaluations on the implemented functions and assess the practicality and believability.
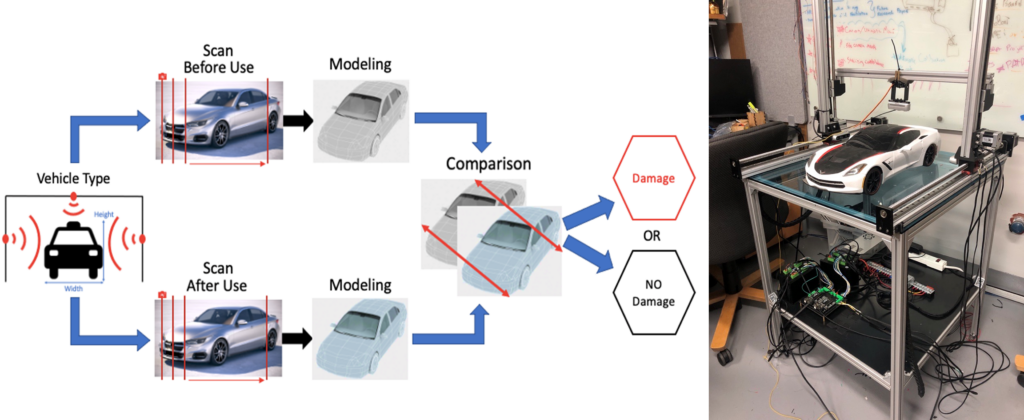
Vehicle Exterior Damage Detection (VEDD)