Skip to main content
ASRL
Navigation
Home
People
Research
Astrodynamics
Lunar Dust Dynamics
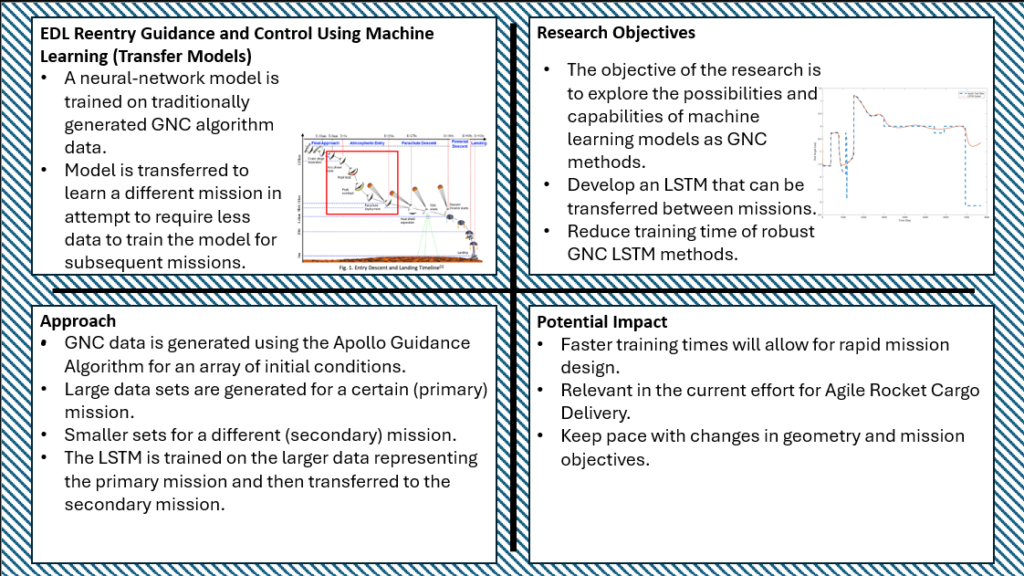
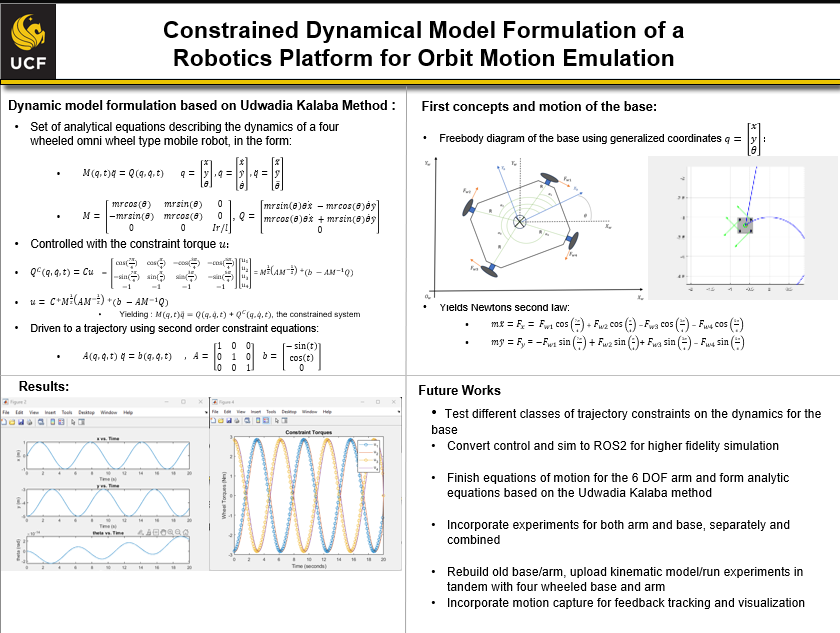
Guidance & Control
Robotics
Publications
News
Sponsors
Guidance & Control
Ongoing Research:
Optimal Control
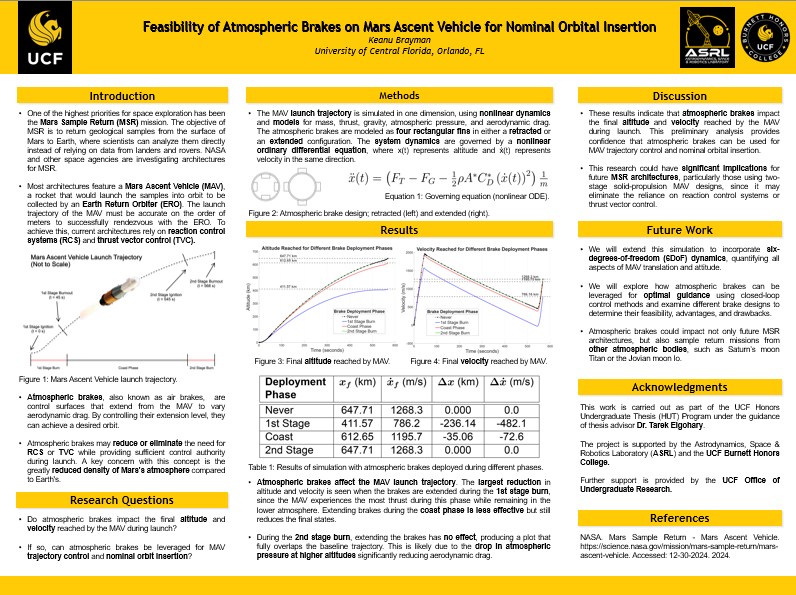
Ascent/Decent Dynamics
Previous Research: